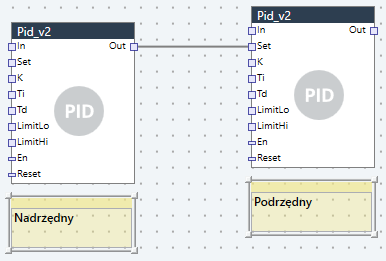
Jeśli w projekcie występuje kaskadowy PID, ustawienie PID zawsze zaczynamy od nastawy podrzędnego PID. Do ustawienia PID korzystamy zazwyczaj z metody Zieglera - Nicholasa.
Na wejście Set regulatora podrzędnego ustawiamy stałą wartość, oddzielając w tym momencie regulator podrzędny od nadrzędnego.
Ustawiamy Regulator podrzędny:
Sprawdzamy jak układ się zachowuje przy zmianie set. np. zmieniając temperaturę zadaną z 21 na 22°C, lub wyłączając i włączając układ. Jeśli to konieczne, skoryguj nastawę K.
Dzielimy wyznaczoną wartość K (np. 125) przez 3 (wychodzi 42), wpisujemy jako wartość domyślną do parametru, który wchodzi do wejścia K.
Przy ustalonym K zaczynamy wyznaczać Ti, (Nie zmieniamy teraz K na 1, K zostaje to, co wyznaczyliśmy - np. 42). Analogicznie wyznaczamy Ti, z tą różnicą, że szukamy maksymalnej wartości od której następuje oscylacja.
Mnożymy wyznaczoną wartość Ti razy 3, zapisujemy wynik jako wartość domyślna do parametru wchodzącego do wejścia Ti regulatora PID.
Jak mamy przeprowadzoną regulacje dla podrzędnego, łączymy wyjście nadrzędnego z wejściem set podrzędnego i wykonujemy analogicznie regulacje co podrzędny, obserwując oscylacje na wyjściu Out PID nadrzędnego. Dla regulacji nie ma znaczenia, czy regulujemy PID, Nagrzewnicę, czy wentylator.
Ważne - zwróć uwagę, aby wartości które nastawiasz były różne od wartości w otoczeniu. To znaczy, ustawiając PID dla chłodzenia, najlepiej przeprowadzić to w lato, w warunkach, których ta chłodnica rzeczywiście ma się załączać. Próba ustawienia PID dla agregatu chłodniczego w centrali nawiewnej przy temperaturze zewnętrznej 15 stopni nie ma sensu. Zwróć też uwagę, czy Twoje algorytmy nie działają na skrajnych wartościach. Ustawienie PID dla agregatu chłodniczego przy temperaturze zewnętrznej 50 stopni i zadanej 20 też nie ma sensu, bo nieważne co ustawisz, agregat będzie pracował na 100% i nigdy nie dojdzie do przeregulowania.
Idealną sytuacją jest wykorzystanie jednego regulatora PID do jednego układu, sam układ powinien być na dodatek liniowy. Przykładowo nagrzewnica elektryczna z płynną regulacją 0-10V. W praktyce często układy idealne nie są. W nagrzewnicach wodnych z zaworem 0-10V, same zawory nie otwierają się liniowo, oprócz tego 20% otwarcia zaworu nie odpowiada 20% przepływu wody.
Aby zabezpieczyć się przed rozregulowaniem układu wynikającym z niedoskonałości automatyki w branży wentylacyjnej itp. zalecam stosowanie wyższego współczynnika bezpieczeństwa niż występuje w literaturze. W literaturze współczynnik do dzielenia i mnożenia K i Ti zazwyczaj wynosi 2, zastosowanie współczynnika 3 powinno zabezpieczyć układ przed problemami (punkt 5. i 7. ustawienia nastaw PID).
Często stosuje się jednak regulator PID do sterowania więcej niż jednym wyjściem, np. przy zastosowaniu regulatora PID do wysterowania temperaturą nawiewu w centrali wentylacyjnej. W takiej sytuacji, jeden PID używa się do sterowania w jednej chwili 2, 3 albo 4 wyjściami na raz. Wyjście z PID zawsze będzie tylko jedno, jednak później za pomocą scalerów, określa się, w jakich zakresach następuje sterowanie danym wyjściem, poniżej przykłady dla ustawienia zakresów w sterowaniu temperaturą nawiewu centrali wentylacyjnej:
Przy jednoczesnym grzaniu i chłodzeniu stosuje się duży margines bezwładności pracy.
Używane zazwyczaj w centralach wentylacyjnych ze stopem centrali (np. praca 7-15). Są trzy szkoły:
Każde z rozwiązań ma swoje dobre i złe strony, ja jednak rekomenduję 3 rozwiązanie.
Przykład ustawienia scalera n-segmentowego:
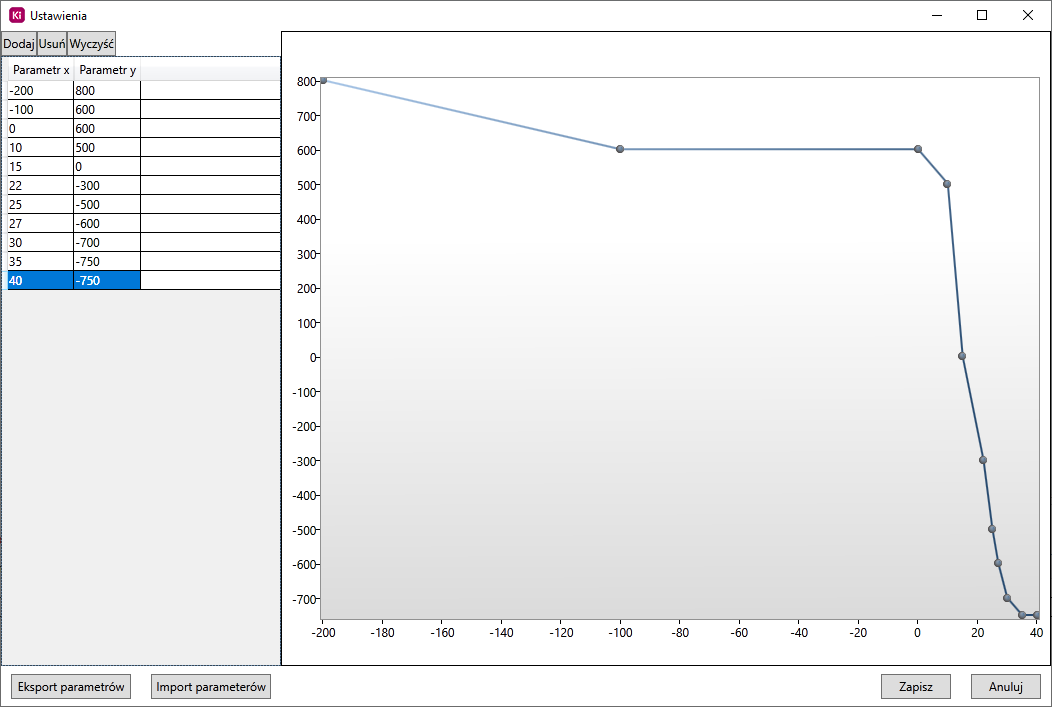
Przykład zastosowania scalera n segmentowego przy Grzanie i chłodzenie, 3 układy - nagrzewnica, chłodnica, wymiennik z przykładu powyżej.
Zdarza się tak, że pomimo książkowo przeprowadzonej regulacji, układ się nie reguluje poprawnie. Po 2 - 3 godzinach standardowej pracy nad regulacją zalecam przeprowadzenie testów działania układu przez sprawdzenie liniowości każdego z nich oraz ich czasu reakcji. Jako przykład weźmy centralę wentylacyjną z algorytmem do regulacji temperatury nawiewu, w przykładzie udział w regulacji biorą:
Aby przeprowadzić poprawnie badania, muszą być spełnione pewne warunki:
Do badania charakterystyki najlepiej wybrać okres, w którym temperatura zewnętrzna będzie utrzymywała się na równym poziomie, np. w nocy. Testowanie charakterystyki w letni poranek może być o tyle niefortunne, że temperatura zewnętrzna w czasie 2 godzin badania wzrośnie z np. 10 do 15°C - takie warunki zewnętrzne nie pozwalają na przeprowadzenie badania.
Przebiegi można zdefiniować za pomocą zestawienia bloków analog select, Rtrig, blinkOnOff, albo za pomocą scalera n-seg.
Przy wysterowaniu 0-10V przebiegi powinny być w miarę liniowe, powinny być dostrzegalne wzrosty mocy cieplnej/chłodniczej w funkcji wysterowania. Przebiegi powinny również być w miarę równe (skoki 0,1 - 0,2 są w porządku, wynikają z rozdzielczości czujników temperatury). Jeśli przebiegi nie są liniowe, pomocne w wysterowaniu może okazać się wprowadzenie scalera n-segmentowego poprawiającego przebieg mocy na liniowy.
Zwróć uwagę na zyski ciepła i chłodu dla różnych układów, jeśli nagrzewnica ma 3x większą moc od odzysku ciepła w wymienniku, uwzględnij to w zakresach wyjścia PID np. wysterowanie wymiennika 100-300 (200 jednostek reguluje wymiennik w przedziale 0-10V), wysterowanie nagrzewnicy 400-1000 (600 jednostek reguluje wysterowanie nagrzewnicy w przedziale 0-10V).
Zwróć uwagę na czas reakcji na wymuszoną zmianę z zakresu 0-10V i 10-0V. Jeśli zmiany są szybkie, nie powinno być większego problemu z regulacją układu. Zobacz jaka jest różnica w czasie reakcji między układami, układ z najdłuższym czasem reakcji jest najtrudniejszy do wysterowania, powinien mieć najwyższy współczynnik TI, układ z najniższym czasem powinien być prostszy do wyregulowania. Podobnie jak z mocą, dla układów z dłuższym czasem reakcji wydłuż zakresy wysterowania - czas ustawiania jest 2x dłuższy - ustaw 2 razy większy zakres regulacji danego układu. Od układu z największą mocą i najdłuższym czasem reakcji powinno również rozpocząć regulację PID.
Jeśli któreś z urządzeń ma bardzo długi czas reakcji na podanie impulsu (stabilizacja temperatury powyżej 5 minut), urządzenie nie reaguje na zmiany wysterowania albo reakcja jest 0-1, może oznaczać to uszkodzenie konkretnego układu.
Znając już charakterystykę całego układu i wiedząc, które z urządzeń ma największą moc oraz najwolniej reaguje na zmiany, proponuję ustawić parametry PID tak, aby poprawnie regulowały tą cześć systemu. Jeśli wyznaczy się poprawne parametry dla najgorszego elementu układu, pozostałe systemy też powinny poprawnie pracować na tych nastawach. W tym celu użyj forsowania, aby wyłączyć pozostałe układy i wyznacz współczynniki K oraz Ti wedle wcześniejszych instrukcji. Temperatura zadana powinna być tak zadana względem temperatury zewnętrznej, aby układ był w stanie dokonać regulacji na tym jednym systemie w tym zakresie. Np. najcięższa do regulacji w układzie jest nagrzewnica wodna, blokujemy działanie agregatu chłodniczego i wymiennika, temperatura zewnętrzna wynosi 10°C, maksymalny wyznaczony we wcześniejszych badaniach zysk ciepła przez nagrzewnicę wynosi 8°C, więc temperaturę zadaną nawiewu ustawiamy jako 14-15°C i dla tych warunków wyznaczamy współczynniki.